AGV को लागि ZLTECH 24V-36V 5A DC इलेक्ट्रिक मोडबस RS485 ब्रशलेस मोटर चालक नियन्त्रक


















प्रकार्य र प्रयोग
1 गति समायोजन मोड
बाह्य इनपुट गति नियमन: बाह्य पोटेन्टियोमिटरको 2 निश्चित टर्मिनलहरू क्रमशः GND पोर्ट र +5v पोर्ट ड्राइभरमा जडान गर्नुहोस्।गति समायोजन गर्न बाह्य पोटेन्टियोमिटर (10K ~ 50K) प्रयोग गर्नको लागि समायोजन अन्त्यलाई SV अन्त्यमा जडान गर्नुहोस्, वा अन्य नियन्त्रण एकाइहरू (जस्तै PLC, एकल-चिप माइक्रो कम्प्युटर, र यस्तै अन्य) मार्फत SV अन्त्यमा एनालग भोल्टेज इनपुट गर्नुहोस् गति नियमन महसुस गर्न। (GND को सापेक्ष)।SV पोर्टको स्वीकृति भोल्टेज दायरा DC OV देखि +5V सम्म छ, र सम्बन्धित मोटरको गति ० देखि मूल्याङ्कन गरिएको गति हो।
२ मोटर रन/स्टप कन्ट्रोल (EN)
GND को सापेक्ष टर्मिनल EN को अन र अफ लाई नियन्त्रण गरेर मोटरको चल्ने र बन्द गर्ने नियन्त्रण गर्न सकिन्छ।जब टर्मिनल प्रवाहकीय हुन्छ, मोटर चल्नेछ;अन्यथा मोटर रोकिनेछ।मोटर रोक्नको लागि रन/स्टप टर्मिनल प्रयोग गर्दा, मोटर स्वाभाविक रूपमा रोकिनेछ, र यसको गति कानून लोडको जडत्वसँग सम्बन्धित छ।
३ मोटर फर्वार्ड/रिभर्स रनिङ कन्ट्रोल (F/R)
मोटरको चल्ने दिशालाई टर्मिनल F/R र टर्मिनल GND को अन/अफ नियन्त्रण गरेर नियन्त्रण गर्न सकिन्छ।जब F/R र टर्मिनल GND प्रवाहकीय हुँदैनन्, मोटर घडीको दिशामा (मोटर शाफ्ट साइडबाट) चल्नेछ, अन्यथा, मोटर घडीको विपरीत दिशामा चल्नेछ।
4 चालक असफलता
जब ड्राइभर भित्र ओभरभोल्टेज वा ओभर-करेन्ट हुन्छ, ड्राइभरले सुरक्षा स्थितिमा प्रवेश गर्नेछ र स्वचालित रूपमा काम गर्न बन्द गर्नेछ, मोटर रोकिनेछ, र ड्राइभरमा निलो बत्ती निभ्नेछ।सक्षम टर्मिनल रिसेट हुँदा (जस्तै, EN GND बाट विच्छेद भएको) वा पावर बन्द हुँदा चालकले अलार्म जारी गर्नेछ।जब यो गल्ती हुन्छ, कृपया मोटर वा मोटर लोड संग तार जडान जाँच गर्नुहोस्।
5 RS485 संचार पोर्ट
ड्राइभर कम्युनिकेशन मोडले मानक मोडबस प्रोटोकललाई अपनाउँछ, जुन राष्ट्रिय मानक GB/T 19582.1-2008 अनुरूप हुन्छ।RS485-आधारित 2-तार सिरियल लिङ्क संचार प्रयोग गर्दै, भौतिक इन्टरफेसले परम्परागत 3-पिन तारिङ पोर्ट (A+, GND, B-) प्रयोग गर्दछ, र क्रमिक जडान धेरै सुविधाजनक छ।
प्यारामिटरहरू
| चालक | ZLDBL4005S |
| इनपुट भोल्टेज (V) | 24V-36V DC |
| आउटपुट वर्तमान (A) | 5 |
| नियन्त्रण विधि | मोडबस RS485 |
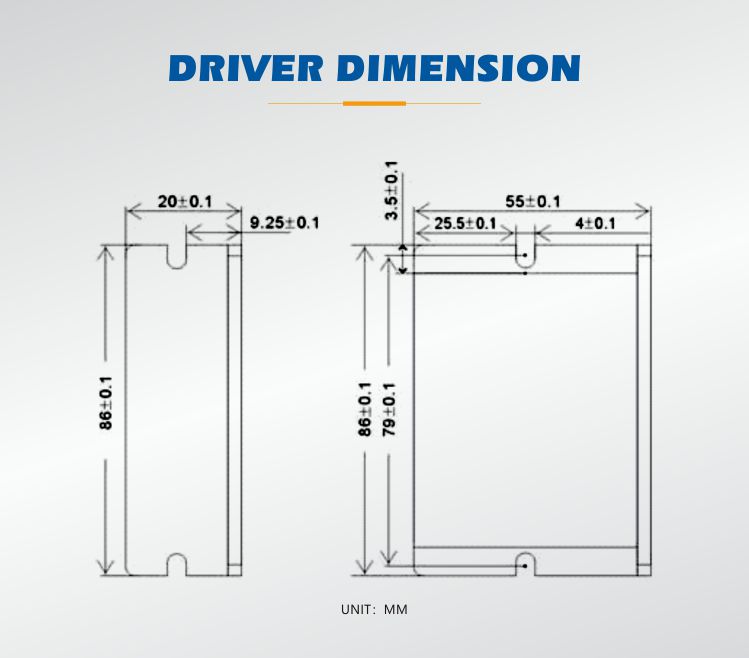
| आयाम (मिमी) | 86*55*20mm |
| वजन (किग्रा) | ०.१ |
आयाम
आवेदन

प्याकिङ

उत्पादन र निरीक्षण उपकरण

योग्यता र प्रमाणीकरण

कार्यालय र कारखाना

सहयोग






